概念
智能体:Agent
感知:Percept
动作:Action
PEAS
性能测量:Performance Measure
环境:Environment
感知器:Sensors
执行器:Actuators
Agent
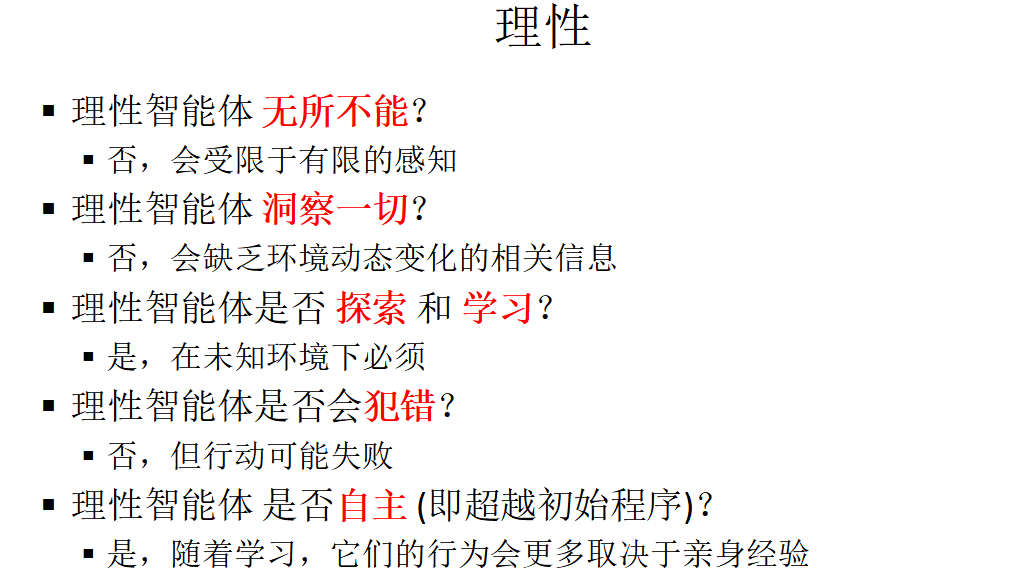
理性智能体:rational agent
an entity that has goals or preferences and tries to perform a series of actions that yield the best/optimal expected outcome given these goals.
具有目标或偏好并尝试执行一系列操作以在给定这些目标的情况下产生最佳/最佳预期结果的实体
反射智能体:reflex agent
one that doesn’t think about the consequences of its actions, but rather selects an action based solely on the current state of the world.
一个不考虑其行为的后果,而是仅根据世界现状选择行动的实体
理性智能体
一个理性智能体会选择可以最大化期望性能度量值的行动
给予迄今为止的感知序列和对环境的先验知识
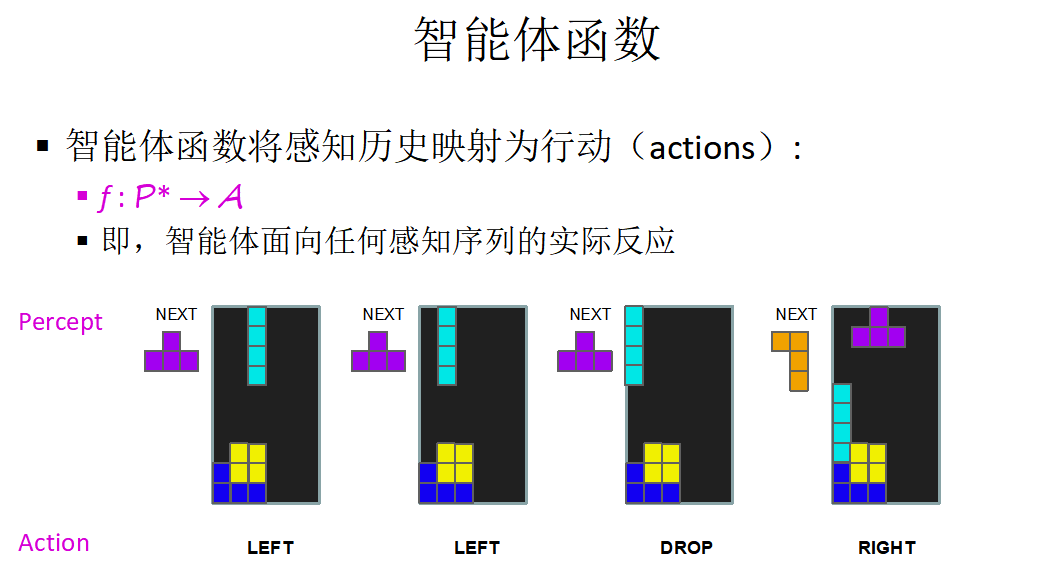
智能体函数
智能体程序
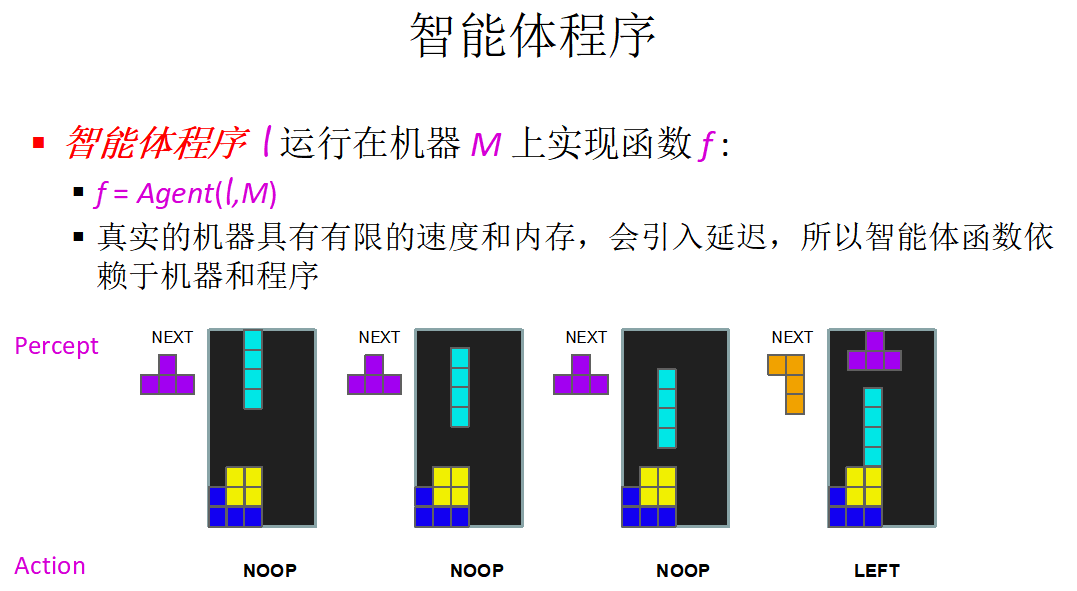
是否每个智能体函数都能由某个智能体程序实现?
不!考虑到智能体可能会遇到停机问题,NP难解问题,或使用慢速PC下棋
环境类型
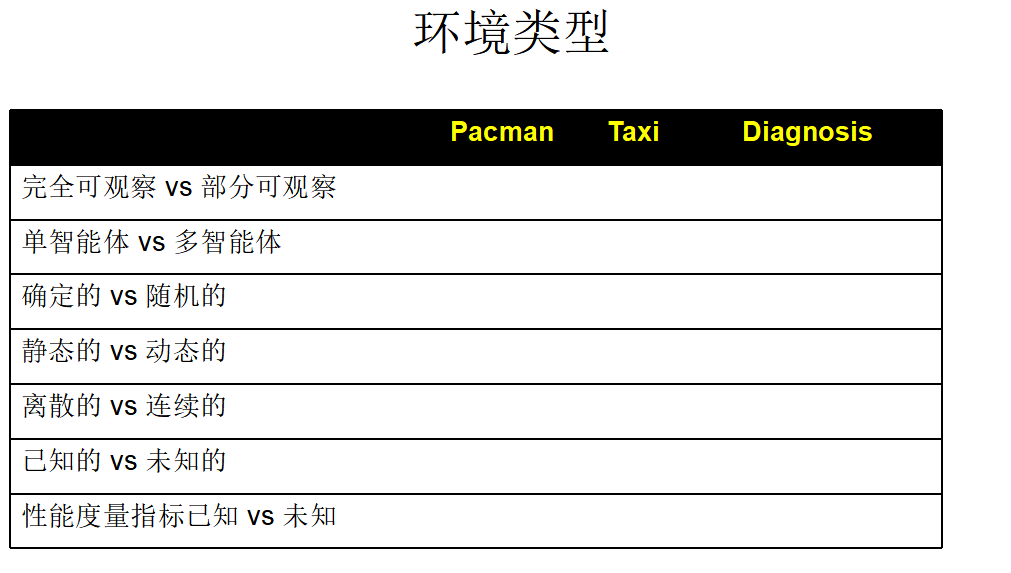
部分可观测环境:partially observable environments
the agent does not have full information about the state and thus the agent must have an internal estimate of the state of the world. This is in contrast to fully observable environments, where the agent has full information about their state
智能体没有有关状态的完整信息,因此智能体必须对世界状态进行内部估计。这与完全可观察的环境形成鲜明对比,在完全可观察的环境中,智能体拥有有关其状态的完整信息
随机环境:Stochastic environments
have uncertainty in the transition model, i.e. taking an action in a specific state may have multiple possible outcomes with different probabilities. This is in contrast to deterministic environments(确定环境), where taking an action in a state has a single outcome that is guaranteed to happen.
随机环境在转换模型中具有不确定性,即在特定状态下采取行动可能有多种可能的结果,概率不同。这与 deterministic environments(确定环境)形成对比,在确定环境(deterministic environments)中,在状态中执行操作具有保证会发生的单一结果。
多智能体环境:multi-agent environments
the agent acts in the environments along with other agents. For this reason the agent might need to randomize its actions in order to avoid being “predictable" by other agents.
在多智能体环境(Multi-agent environments)中,智能体与其他智能体一起在环境中运行。因此,智能体可能需要随机化其操作,以避免被其他智能体“预测”
静态环境:stastic environments
If the environment does not change as the agent acts on it, then this environment is called static. This is contrast to dynamic environments that change as the agent interacts with it.
如果环境在代理程序作用于环境时没有发生变化,则此环境称为静态环境。这与动态环境形成鲜明对比,动态环境会随着代理的交互而变化。
已知环境:known physics
If an environment has known physics, then the transition model (even if stochastic) is known to the agent and it can use that when planning a path. If the physics are unknown the agent will need to take actions deliberately to learn the unknown dynamics.
如果环境具有已知的物理特性,则 agent 知道过渡模型(即使是随机的),并且可以在规划路径时使用它。如果物理特性未知,智能体将需要有意识地采取行动来了解未知的动态
在这里,
know physics应该是指已经被人类探索出来的规律;而unknown physics则是指尚且没有得知的规律